Sense Plan Act model
#해당 내용은 패스트 캠퍼스 자율주행을 위한 컴퓨터 비전과 라이다 &센서 퓨전까지를 개인적 목적으로 복습 하는 용도 입니다.
자율 주행차는 쉽게 말해, 센스 플랜 액트 모델로 구성되어 있다
센서 모델은 사람의 눈 처럼, 현재 차의 상태와 주변의 상태를 파악하는 것, 그리고 플랜 모델은 그에 따라서 내 목적지까지 가는 주행을 계획하는 것, 그리고 마지막 액트는 실제 계획에 따라 조향하고, 엔진 출력증 조정하는 것이다.
세부적으로 자율주행차는 앞선 센스 플랜 액트 모델에 따라 다음과 같이 구성되어 있다.
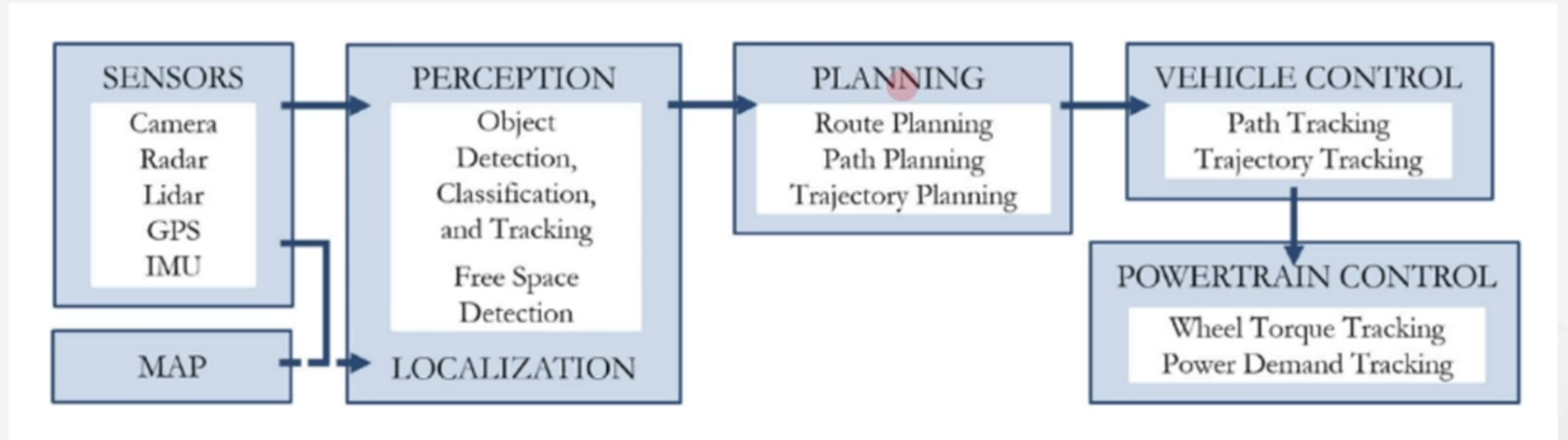
이 중에서도 perception은 자율주행에 있어서 매우 중요한 역할을 한다.
왜냐하면 아래 그림처럼 자율주행 차량은 radar, lidar, camera, ultrasonic 센서를 통해서, 자동차가 주행을 어떻게 할지를 결정하도록 하는 reference 정보를 제공할 뿐 아니라, 자율주행차는 이 정보를 전적으로 신뢰하기 때문이다.

또한 이런한 perception은 아래의 자율주행 보조 시스템에서도 사용된다. 이러한 기능은 운전자 부주의로 인한 교통 사고를 예방하며, 안전한 주행이 될 수 있도록 보조한다.
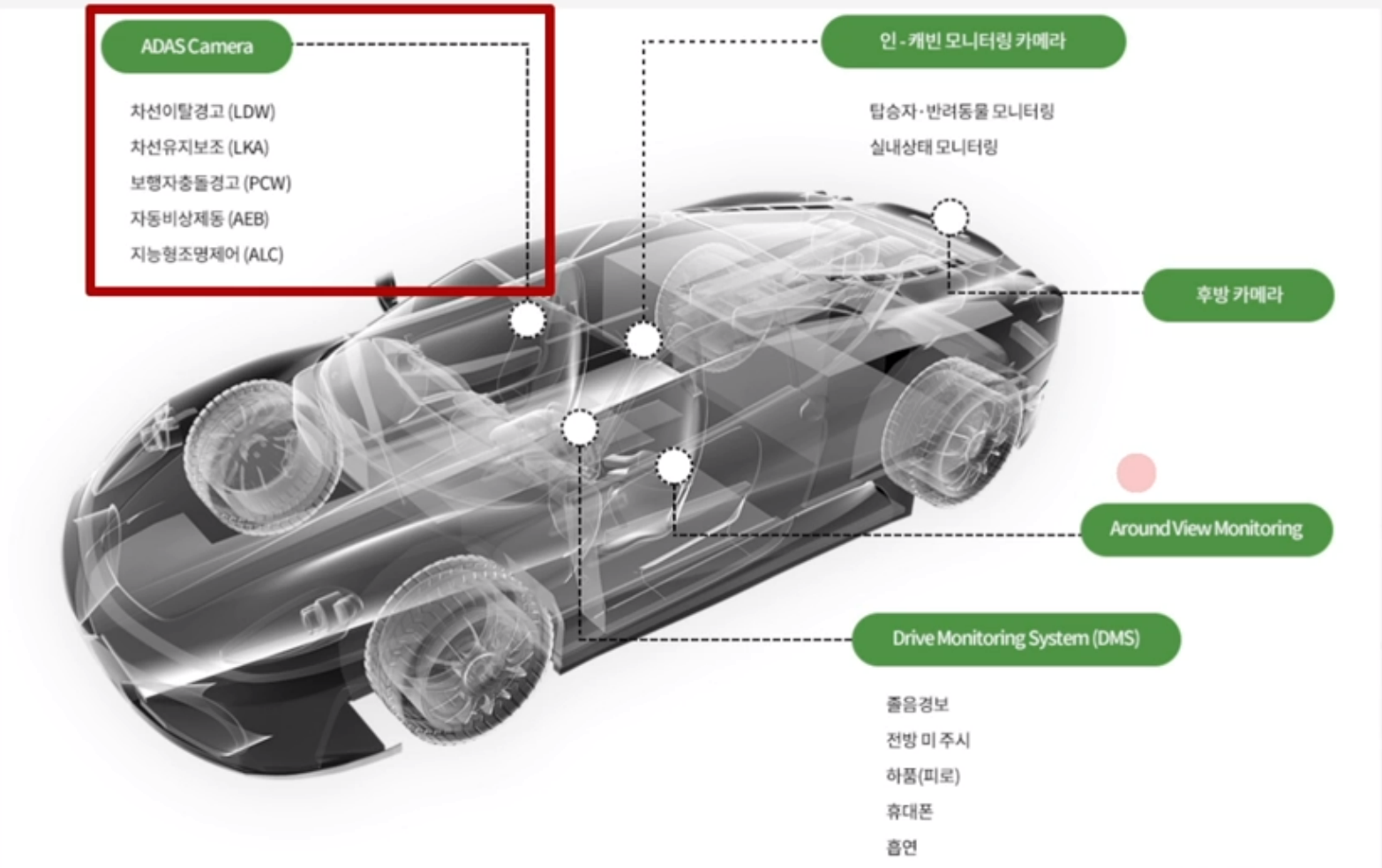
이러한 자율 주행 보조 시스템을 만들기 위해서는 컴퓨터 비전 기술이 사용되며, 필수적이다.
이는 기계가 이미지를 자동으로 인식하고 정확하고 효율적으로 설명하는 데 사용되는 기술이다.
컴퓨터 비전은 다음과 같이 분류된다.

그렇다면 자율주행 보조 시스템에 어떤 비전 기술이 사용될까?
Face Recongition, Object Detection, Segmentation에 사용될 수 있다.
이를 통해 ADAS 와 DMS를 구현하는 것을 프로젝트로 해보고자 한다.